- JP
- EN
December 21, 2018
MOL Conducts Assessment and Feasibility Study of Advanced Navigation Support System Utilizing Collision Avoidance Algorithm
-Initiative Leads to Automatic Prevention of Collisions; Marks Step toward Autonomous Sailing-
 TOKYO-Mitsui O.S.K. Lines, Ltd. (MOL; President & CEO: Junichiro Ikeda) today announced that MOL, MOL Techno-Trade, Ltd. (President: Hirokazu Hatta; Headquarters: Chuo-ku, Tokyo), the National Maritime Research Institute (NMRI; Director General: Hiroyuki Yamato; Head Office: Mitaka-shi, Tokyo), and Tokyo University of Marine Science and Technology (TUMSAT; President: Toshio Takeuchi; Location: Minato-ku, Tokyo) jointly conducted an assessment and feasibility study on advanced navigation support systems, using the NMRI-owned ship handling risk simulator, which has a horizontal view angle of 240°C.
TOKYO-Mitsui O.S.K. Lines, Ltd. (MOL; President & CEO: Junichiro Ikeda) today announced that MOL, MOL Techno-Trade, Ltd. (President: Hirokazu Hatta; Headquarters: Chuo-ku, Tokyo), the National Maritime Research Institute (NMRI; Director General: Hiroyuki Yamato; Head Office: Mitaka-shi, Tokyo), and Tokyo University of Marine Science and Technology (TUMSAT; President: Toshio Takeuchi; Location: Minato-ku, Tokyo) jointly conducted an assessment and feasibility study on advanced navigation support systems, using the NMRI-owned ship handling risk simulator, which has a horizontal view angle of 240°C.
On watch-keeping during ship operations, mariners must first be able to see an object, and then judge whether that object poses a risk to the vessel. If that is the case, the vessel must take some action to avoid the risk, such as veering, slow steaming, and so on. The "Obstacle Zone by Target" (OZT) algorithm supports mariners' ability to spot objects and determine the whether they are potential risks.
Conventional collision avoidance is a highly skilled process based on maritime officers' experience and knowledge. However, by utilizing the navigation support system incorporating OZT, the vessel collision avoidance algorithm, a vessel can find an area where it can navigate safely. In addition, the system's bridge view display allows mariners to determine the positions of nearby vessels and decide which ones present risks.
MOL and its partners continue research and development (Note 1) toward realization of augmented reality (AR) technology (Note 2, Note 3), which overlaps displays of information from the Automatic Identification System (AIS) and radar, camera images from the bridge, and advanced navigation support systems, with the long-range goal of autonomous sailing and automatic collision prevention utilizing OZT.
MOL has moved ahead with advanced support of safe operation and reduction of its environmental impact, as set out in the "ISHIN NEXT-MOL SMART SHIP PROJECT-," started in November 2016, and aims to become customers' first choice as a logistics partner by applying ICT technology to improve service quality and efficiency.

Ship handling simulator used for the experiment

During the experiment
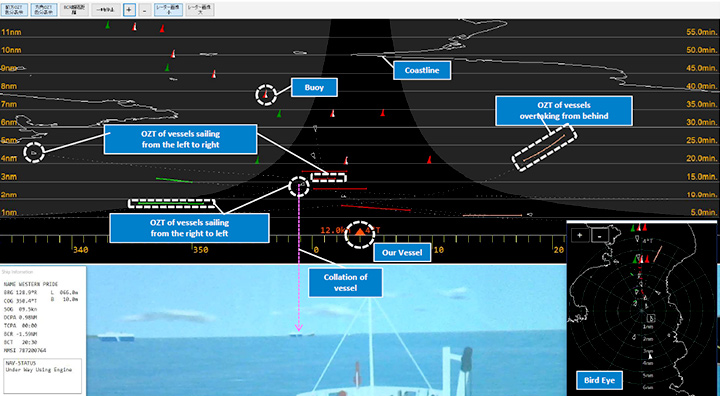
OZT screen
(Note 1)
July 6, 2018 press release: "MOL to Join Research on Advanced Navigation Support System Leading to Automatic Collision Avoidance Function - Further Initiatives to Realize Future Autonomous Ships -"
(Note 2)
December 26, 2017 press release: "MOL Jointly Develops Voyage Information Display System Using AR Technology that Will Lead to Autonomous Ships in the Future - Supporting Ship Operation and Watch-keeping to Enhance Safety -"
(Note 3)
October 11, 2018 press release: "MOL Plans to Install Voyage Information Display System Using AR Technology on VLCC subsequently to Car Carrier - Supporting Ship Operation and Watch-keeping to Enhance Safety -"