- JP
- EN
2018年12月21日
衝突回避アルゴリズムを活用した先進的な航行支援システムの評価、および公開実験を実施
-自律航行に向けた自動衝突防止にも繋がる取り組み-
 株式会社商船三井(社長:池田潤一郎、本社:東京都港区、以下「商船三井」)および商船三井テクノトレード株式会社(社長:八田宏和、本社:東京都中央区)は、国立研究開発法人海上・港湾・航空技術研究所 海上技術安全研究所(理事長:大和裕幸、本所:東京都三鷹市、以下「海上技術安全研究所)および国立大学法人東京海洋大学(学長:竹内俊郎、所在地:東京都港区、以下「東京海洋大学」)と、「先進的な航行支援システムに関する共同研究」の評価、および研究成果の公開実験(以下、本実験)を、海上技術安全研究所が有する水平視野角240度の操船リスクシミュレータを用いて実施しました。
株式会社商船三井(社長:池田潤一郎、本社:東京都港区、以下「商船三井」)および商船三井テクノトレード株式会社(社長:八田宏和、本社:東京都中央区)は、国立研究開発法人海上・港湾・航空技術研究所 海上技術安全研究所(理事長:大和裕幸、本所:東京都三鷹市、以下「海上技術安全研究所)および国立大学法人東京海洋大学(学長:竹内俊郎、所在地:東京都港区、以下「東京海洋大学」)と、「先進的な航行支援システムに関する共同研究」の評価、および研究成果の公開実験(以下、本実験)を、海上技術安全研究所が有する水平視野角240度の操船リスクシミュレータを用いて実施しました。
操船時の当直においては、まず対象物が見えている(認識できる)かどうか、その次に当該対象物が本船に対し危険を及ぼす可能性があるかどうかを判断します。そして、危険を及ぼす可能性があると判断された場合は、何らかの手法(変針や減速等)によりその危険を回避する行動をとります。「相手船による航行妨害ゾーン(以下、OZT:Obstacle Zone by Target)」は、上述の対象物が見えるかどうかと、危険を及ぼす可能性を判断する支援を行うものになります。
従来の衝突回避は航海士の経験と知識に基づいた熟練作業ですが、船舶の衝突回避アルゴリズムであるOZTの概念を導入した航行支援システムを活用することにより、自船が安全に航行することができる領域を見つけることができ、安全運航を適切に支援します。また、船橋(ブリッジ)から見える風景に相手船の位置を合わせて表示することで、どの方位に衝突の危険があり、危険対象がどの船舶かを照合することができます。
今後は、AISやレーダーの情報と船橋からのカメラ映像を重ねて表示する拡張現実(AR:註1、註2)や、OZTを活用する自律航行や自動衝突防止に繋がる先進的な航行支援システムの実現に向けて更なる研究開発(註3)に取り組んでいきます。
商船三井は、2016年11月に発表した「船舶維新NEXT~MOL SMART SHIP PROJECT~」の掲げる高度安全運航支援・環境負荷低減を推進すると共に、ICT技術を利活用したサービス向上を通じ、物流のビジネスパートナーとしてお客様に選ばれる企業グループを目指します。

実験で活用した操船リスクシミュレータ

実験の様子
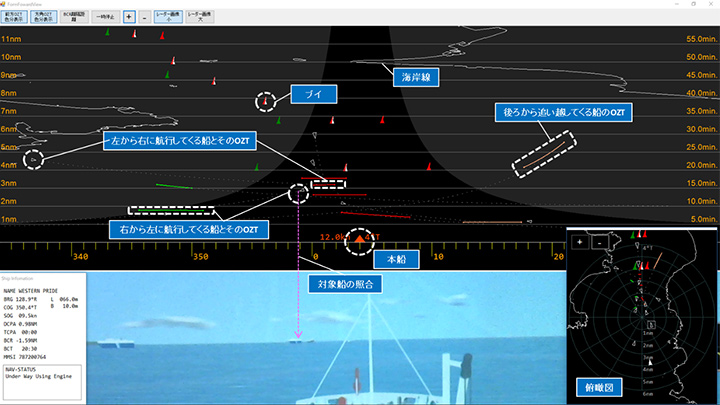
OZT画面
(註1)2017年12月26日付プレスリリース「将来の自律航行船に繋がるAR技術を活用した航海情報表示システムを共同開発 ~航海中の操船や見張りをサポートし、安全運航体制を一層強化~」
(註2)2018年10月11日付プレスリリース「自動車運搬船に続き、大型原油タンカーへのAR技術を活用した航海情報表示システムの試験搭載 ~航海中の操船や見張りをサポートし、安全運航体制を一層強化~」
(註3)2018年7月6日付プレスリリース「自動衝突防止に繋がる先進的な航行支援システムに関する共同研究を開始 ~将来の自律航行船の実現に向けた更なる取り組み~」