- JP
- EN
October 19, 2020
MOL Steps up Research Aimed at Autonomous Collision Avoidance
- Part of Initiative to Realize Autonomous Ships -

TOKYO-Mitsui O.S.K. Lines, Ltd. (MOL; President & CEO: Junichiro Ikeda) today announced that the company has signed a contract to conduct a joint study on collision avoidance algorithms and autonomous collision avoidance. The company is teaming up on the study with MOL Marine Co., Ltd. (President: Toshikazu Inaoka; Headquarters: Minato-ku, Tokyo), National Maritime Research Institute of National Institute of Maritime, Port and Aviation Technology(MPAT; President: Yoshiaki Kuriyama; Headquarters: Mitaka-shi, Tokyo), Tokyo University of Marine Science and Technology (President: Toshio Takeuchi; Location: Minato-ku, Tokyo), MOL Techno-Trade, Ltd. (President: Hirokazu Hatta; Headquarters: Chuo-ku, Tokyo), and YDK Technologies Co., Ltd. (President: Makoto Ootake; Headquarters Shibuya-ku, Tokyo).
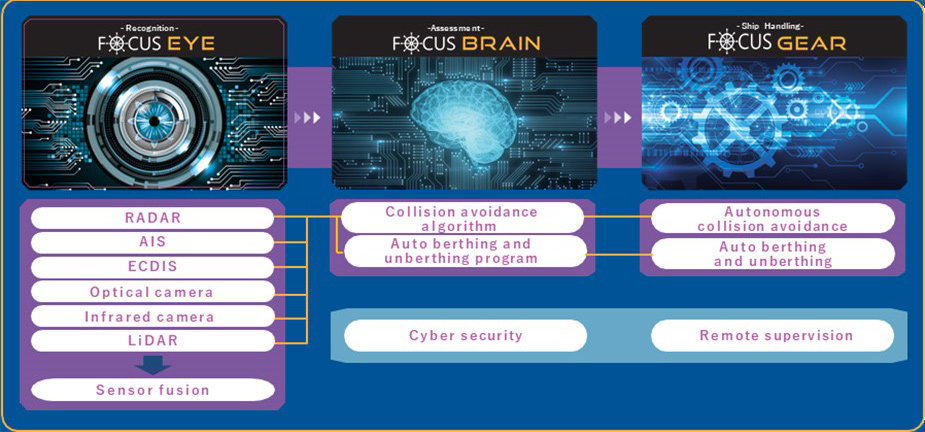
The goal of the joint study is to develop an advanced navigation support system that will lead to autonomous collision avoidance, using rule-based artificial intelligence and deep reinforcement learning algorithm (Note 2). This will enable systems to estimate several Obstacle Zones by Target (OZT) (Note 1) among different ships and propose a route that minimizes the risk of a collision.
Demonstration testing with Tokyo University of Marine Science and Technology's Shioji Maru has been conducted in congested sea areas such as Tokyo Bay as a part of continuous efforts to develop computational algorithms using OZT and avoidance route computational algorithms. The test confirmed the ability to estimate OZT targeting several target ships in actual operation and develop and suggest avoidance routes in real time onboard and verified the system's effectiveness in supporting collision avoidance. The test also aimed to develop a collision avoidance system that realizes medium-to-long-term strategies for avoidance navigation well before target ships pose a risk in congested sea lanes, and takes into consideration the experience of maritime officer and other personnel in terms of safety and security.
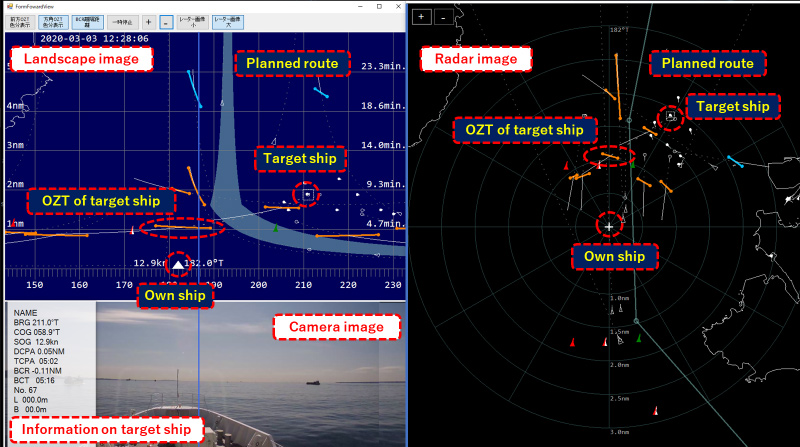
Shioji Maru(landscape image/radar image/camera image)
Target ship: Equipped with Automatic Identification System (AIS) and Target Tracking (TT)
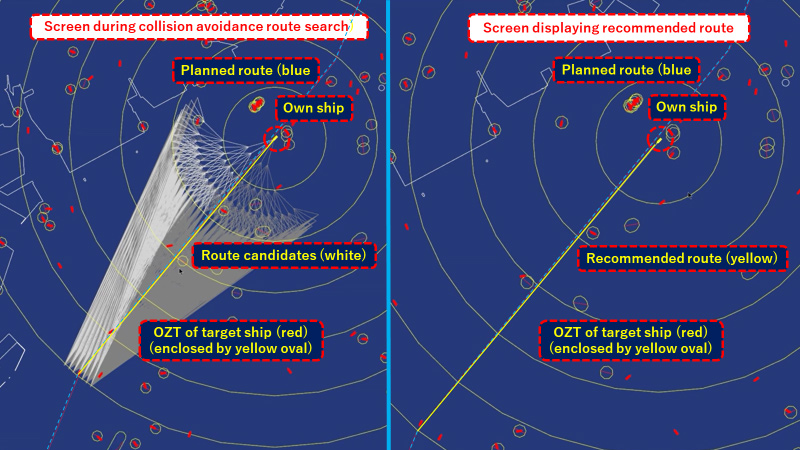
Screen displaying avoidance route (while determining/suggesting the route)
This study advances the system's development of Assessment in MOL's initiative on autonomous navigation.
MOL has moved ahead with advanced support of safe operation and reduction of its environmental impact, as set out in the "ISHIN NEXT-MOL SMART SHIP PROJECT-," started in November 2016, and aims to become customers' first choice as a logistics partner by applying ICT technology to improve service quality and efficiency.
(Note 1)
July 6, 2018 press release:
"MOL to Join Research on Advanced Navigation Support System Leading to Automatic Collision Avoidance Function - Further Initiatives to Realize Future Autonomous Ships -"
December 21, 2018 press release:
MOL Conducts Assessment and Feasibility Study of Advanced Navigation Support System Utilizing Collision Avoidance Algorithm -Initiative Leads to Automatic Prevention of Collisions; Marks Step toward Autonomous Sailing-
December 20, 2019 press release:
MOL to Start Joint Study on Collision Avoidance Algorithms and Autonomous Collision Avoidance - Named 'Focus Brain' Series Aspiring Development of Artificial Intelligence for Autonomous Navigation-
(Note 2)
Rule-based AI: Method in which people make rules on what behavior to take under given conditions
Deep reinforcement learning algorithm: Method that machine learns behavior under given conditions