- JP
- EN
2020年10月19日
自動衝突防止を目指した実証実験の深度化
~自律航行実現に向けた取り組み~

株式会社商船三井(社長:池田潤一郎、本社:東京都港区、以下「商船三井」)、株式会社MOLマリン(社長:稲岡俊一、本社:東京都港区)、国立研究開発法人海上・港湾・航空技術研究所 海上技術安全研究所(理事長:栗山善昭、本所:東京都三鷹市、以下「海上技術安全研究所」)、国立大学法人東京海洋大学(学長:竹内俊郎、所在地:東京都港区、以下「東京海洋大学」)、商船三井テクノトレード株式会社(社長:八田宏和、本社:東京都中央区)及び株式会社YDKテクノロジーズ(社長:大竹眞、本社:東京都渋谷区)は、「避航操船アルゴリズムと避航自動化に関する共同研究」を行っていくことで合意し、契約を締結しました。
本共同研究では、自船の針路に対する相手船による航行妨害ゾーン(Obstacle Zone by Target:OZT)(註1)を複数の相手船に関して推定するとともに、これら複数のOZTを避けて航行する避航航路の提案に向け、ルールベースや深層強化学習(註2)も活用した自動衝突防止に繋がる先進的航行支援システムの実現を目標としています。
OZT演算アルゴリズム開発及び避航航路演算アルゴリズム開発の一環として、東京海洋大学「汐路丸」による東京湾などの輻輳海域で実証実験を実施し、実海域で複数の相手船を対象としたOZTの推定及び避航航路の提案について、船上でリアルタイムに演算できる事を確認すると共に避航操船支援システムとしての有効性を継続して検証しています。更に、輻輳海域で見合い関係になる前の中・長期的避航戦略及び海技者経験等を考慮した安全・安心を実現する避航操船支援システムの実現を目指します。
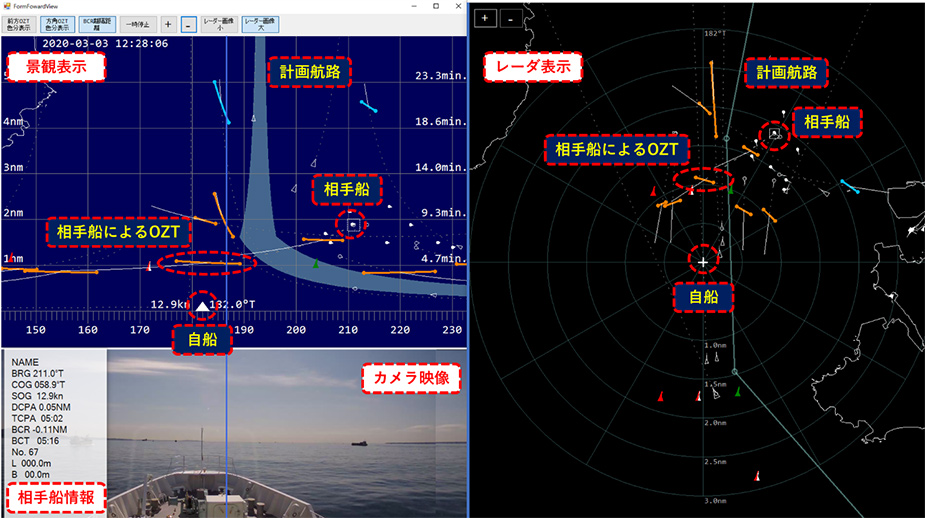
OZTの表示画面(景観表示/レーダ表示/カメラ映像)
相手船:AIS搭載船及びTT捕捉船(註3)
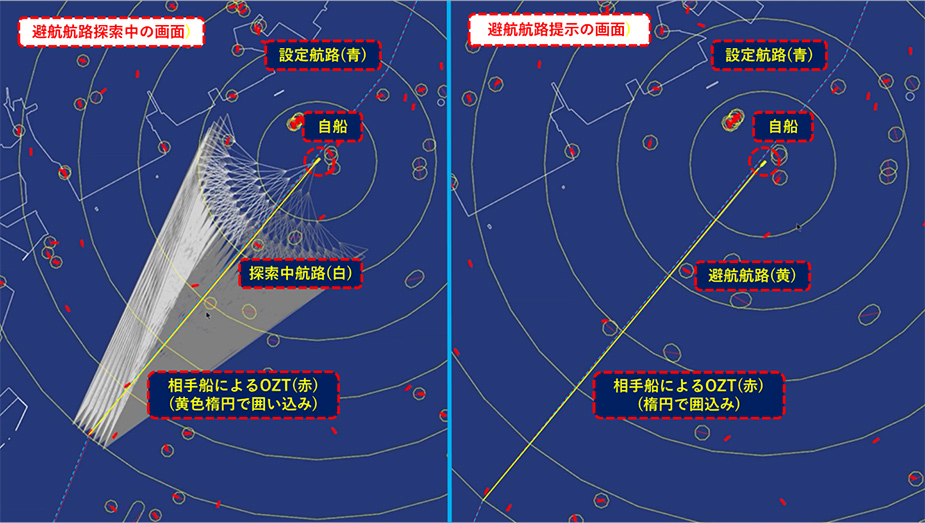
避航航路の表示画面(避航航路探索中/避航航路提案)
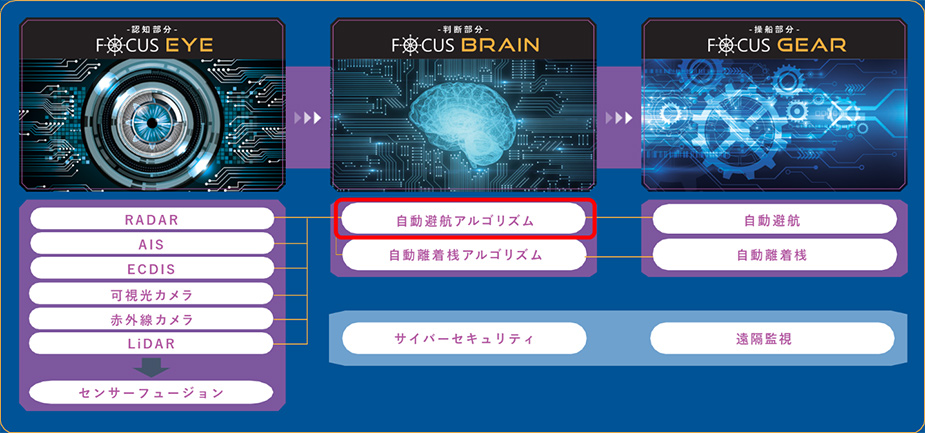
本研究では、当社の自律航行への取り組みの判断部分に関連する開発を進めております。
商船三井は、2016年11月に発表した「船舶維新NEXT~MOL SMART SHIP PROJECT~」の掲げる高度安全運航支援・環境負荷低減を推進すると共に、ICT技術を利活用したサービス向上を通じ、物流のビジネスパートナーとしてお客様に選ばれる企業グループを目指します。
(註1) 2018年7月6日付けプレスリリース「自動衝突防止に繋がる先進的な航行支援システムに関する共同研究を開始 〜将来の自律航行船の実現に向けた更なる取り組み~」
2018年12月21日付けプレスリリース「衝突回避アルゴリズムを活用した先進的な航行支援システムの評価、および公開実験を実施 -自律航行に向けた自動衝突防止にも繋がる取り組み-」
2019年12月20日付けプレスリリース「避航操船アルゴリズムと運航自動化に関する共同研究を開始 ~自律航行実現に向けた人工知能の開発を目指し「FOCUS BRAIN」シリーズを命名~」
(註2) ルールベース:与えられた条件でどのような行動を取るか人間がルール化する手法
深層強化学習:与えられた条件でどのような行動を取るか機械が試行錯誤して学習する手法
(註3) AIS:(船舶自動識別装置; Automatic Identification System)
TT :(目標追尾; Target Tracking)